11.09.2014


Ни для кого не секрет, что большинство ДТП происходит из-за человеческого фактора. Поэтому нам с детьми пришла идея создать автомобиль который будет управляться не человеком, а роботом. Автомобиль, управляемый не людьми а компьютером – это значит сделать его безопасным. Машины, обладающие интеллектом, полностью исключают аварии и нарушение ПДД, так как робот не устает, не переживает, не опаздывает и не торопится. Автомобиль будущего должен полностью контролировать дорожную ситуацию. Считывать знаки, светофоры и общаться с соседними автомобилями. А управлять чудо-машиной можно при помощи заранее написанной программе или при помощи компьютера. Так же автоматизированные машины можно использовать как общественный транспорт, который будет приезжать вовремя и останавливаться только в положенных местах. Такой автомобиль также может спокойно доставлять грузы или отвозить хозяина домой, если он сам не в состоянии сесть за руль.
Работа над этим проектом шла весь 2013-14 учебный год. Конечной целью которого было создать автомобиль, который будет способен самостоятельно без участия водителя проехать по заданному маршруту, при этом не нарушая правил дорожного движения и распознавая и объезжая препятствия на дороге. Для выполнения конечной задачи мы решили начать с более простых задач, для начала что бы автомобиль выполнил какие-либо маневры на площадке (проехаться по «змейке» или по кругу).
В команде разработчиков данного автомобиля состояли пятеро ребят в возрасте от 12 до 16 лет - по одному из разных технических кружков. Каждый из них отвечал за свою часть работы: два механика-конструктора, два программиста и один который отвечал за электрооборудование и электропроводку. Во время работы над проектом дети приобрели знания при решении практических задач и проблем, требующих интеграции знаний из различных предметных областей. А так же изучили новый для них, вид программирования. И не маловажной частью работы над проектом было не только изучение и разработка механизмов и программ, а также работа в одной слаженной команде.
Расскажу вам вкратце про то, как мы делали автомобиля-робота, и почему мы его сделали именно так.
В начале 2013-2014 учебного года начали работать над роботизированным автомобилем. Задачей этого проекта было создать автомобиль, который будет способен самостоятельно без участия водителя проехать по заданному маршруту, при этом не нарушая правил дорожного движения и распознавая и объезжая препятствия на дороге. Но для начала мы поставили себе цель, что бы на конец этого учебного года наш автомобиль выполнил в автономном режиме хотя бы пару элементов.
Первой грубой моделью этого проекта выступил автомобиль ВАЗ 2109, этот автомобиль стоял на списании и был в плачевном состоянии, но так как другого выбора у нас не было, нам пришлось его «реанимировать» (то есть привести в чувства). В то время пока одни пытались отремонтировать машину, мы с детьми начали работу над проектом.
Вторым автомобилем у нас был Daewoo Matiz, автомобиль в хорошем состоянии и в добавок еще и с автоматической коробкой передач (это облегчило нам работу с переключением передач, и избавило нас от педали сцепления).
Нашу дальнейшую работу над проектом мы разделили на этапы:
1. Распределение обязанностей.
Всего в проекте участвовало пятеро детей школьников в возрасте от 12 до16 лет. Они с роботами они уже знакомы, так как раньше уже занимались на кружках по робототехнике в нашем центре. Так что процесс распределения обязанностей не занял долго времени. Мы выделили следующие обязанности:
· Механик-конструктор.
· Программист контроллера Arduino, программист контроллера VEXCortex.
· Специалист по электрооборудованию и электропроводке.
Дети выбрали себе те обязанности в которых они сильны и разбирались лучше остальных.
2. Разработка макета конструкций.
Для начала мы решили создать макеты конструкций, которые будут установлены на наш автомобиль. Для макетов мы использовали обычный образовательный конструктор LEGOMinstormsEV3. Почему мы взяли этот конструктор – в наборе этого конструктора имеются различные детали для сборки, а также зубчатые шестерни различного размера, реечные передачи, и различные датчики. Для макетирования очень удобно использовать.
Большого вниманию этому пункту не буду уделять, так как пока работали с макетами перебрали много различных вариантов управления педалями и рулем (переключать скорости мы решили, что не будем так как машина старая и довольно тяжело попасть в нужную скорость).
3. Контроллеры и электрооборудование.
В первом автомобиле мы использовали три контроллера ArduinoUNO и три MotorShield для них. Один контроллер отвечал за рулевое управление и энкодер расположенный на руле, второй контроллер отвечал за управление педалями газа и сцепления. А третий контроллер отвечал за управление педалью тормоза, и снимал показания с ультразвуковых датчиков расстояния, расположенных на переднем бампере.
Первая проблема с которой мы встретились это выбор моторов. У моторов которые у нас были в наличии не хватало мощности нажать на педали, начали искать другие моторы. В итоге мы сняли моторчики с электро-стеклоподъемников (рис. 1) этого же автомобиля (ВАЗ 2109), использовали их в педальном блоке, и в рулевом управлении.

(рис.1) Моторчик от
электро-стеклоподъемников
Вторая небольшая проблема возникла в подключение моторов от стеклоподъемников к ArduinoUNO, мы использовали для этого MotorShield. А питание взяли с аккумулятора автомобиля. Но все равно моторы вращались медленно и слабо (напряжение на мотор поступает 12 вольт, но сила тока слишком маленькая 50 mA). Поэтому было принято решение использовать автомобильные реле типа 90-3747-11 (рис. 2), для управления моторами.

(Рис.2) Реле типа 90-3747-11
Во втором автомобиле мы использовали всего 2 контроллера:
· Arduino UNO вместес Motor Shield
· VEX Cortex
ArduinoUNO мы использовали для управления замком зажигания, габаритами, ближним светом фар и снимали показания с ультразвуковых датчиков расстояния, которые располагались на переднем бампере. VEXCortex использовали для управления механической частью автомобиля (педалями, рулевым колесом и коробкой передач), так же снимали показания с ультразвуковых датчиков расстояния, но которые располагались по бокам автомобиля.
Во всех механизмах управления автомобилем мы использовали 2-х проводные моторы 393 совместном моторным контроллером 29 (рис. 3). Использовали в конструкции только эти моторы, если не хватало мощности, то ставили два мотора.

(рис.3) 2-х проводной мотор 393,
и моторный контроллер 29
Для того что бы контролировать положение руля, и положение педалей мы использовали так же из набора VEX – «Оптический датчик положения вала» (Энкодер) (Рис. 4). Этот энкодер удобен тем что мы могли его разместить на любой вал который нас интересовал.

(рис.4) Оптический датчик
положения вала (Энкодер)
Для того чтобы ограничить включение подворотников и переключение ручки КПП мы использовали концевые переключатели (Рис. 5) из набора VEX. Два вида переключателей:
1. Limit switch
2. Bumper switch


(рис.5) Концевые переключатели:
1-Limit switch, 2-Bumper switch
Так же для обратной связи использовали ультразвуковые датчики расстояния. Использовалось два типа датчиков:
1. Датчики HC-SR04 - располагались на переднем бампере были подключены к ArduinoUNO. (рис. 6)

(рис.6)Ультразвуковой
датчик HC-SR04
2. Ультразвуковой дальномер из набора VEX – использовался по бокам автомобиля. (Рис. 7)

(рис.7) Ультразвуковой дальномер
из набора VEX
4. Механика.
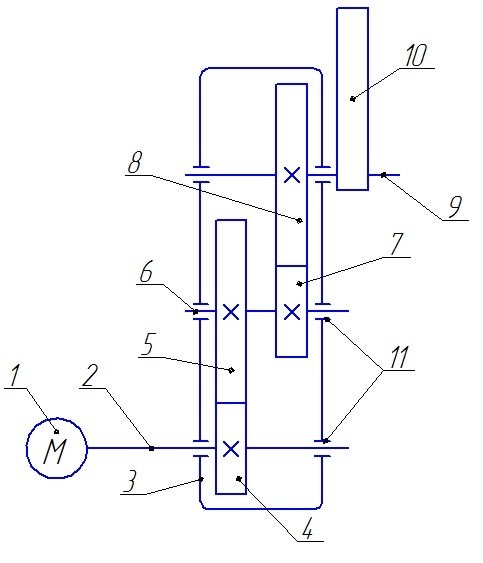
Электродвигатель(Мотор)
1) Вал быстроходный
2) Корпус редуктора
3) Вал-шестерня быстроходной ступени
4) Зубчатое колесо быстроходной ступени
5) Промежуточный вал
6) Вал-шестерня тихоходной ступени
7) Зубчатое колесо) тихоходной ступени
8) Тихоходный вал
10) Исполнительный механизм прикрепленный к валу (9)
11) Подшипниковый узел со сквозной крышкой и с уплотнением
Кинематическая схема привода (управления педалями)
Итак, крутящий момент передается: с вала электродвигателя 2 на быстроходную ступень 4-5, далее на промежуточном валу на участке 5-7 на тихоходную ступень 7-8, далее на тихоходный вал 9 и на исполнительный механизм 10.
Фото уже установленной на автомобиль понижающей кинематической передачи (Рис. 9,10).
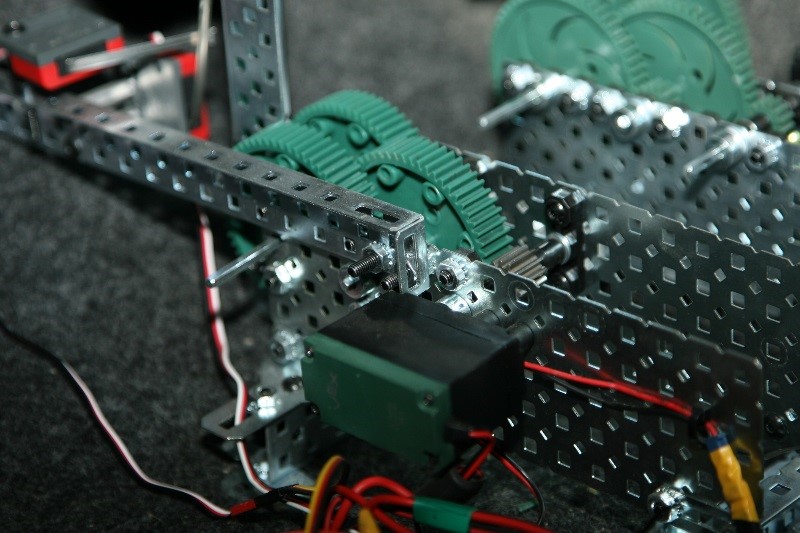
(рис.9) Механизм управления педалями.
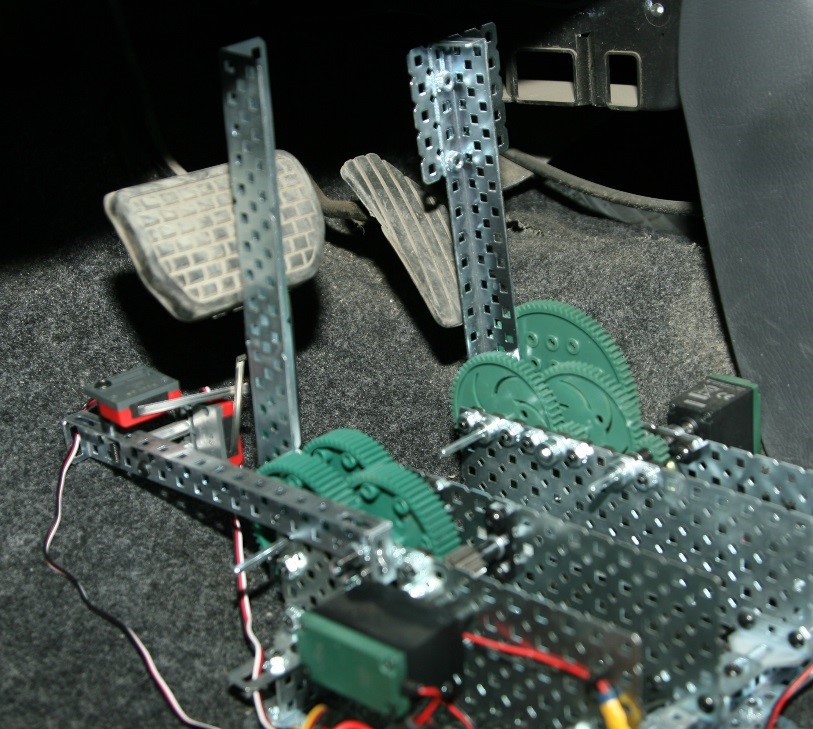
(рис.10) Механизм управления педалями.
С управлением рулевым колесом больших проблем не возникло. Сходили в магазин где продают запчасти для велосипедов, и купили там две велосипедные звездочки и цепь для них. После этого мы сняли руль с машины и отдали сварщику, что бы он приварил к рулю велосипедную звездочку (Рис. 11). Далее установили рулевое колесо на место и натянули цепь (Рис. 12).

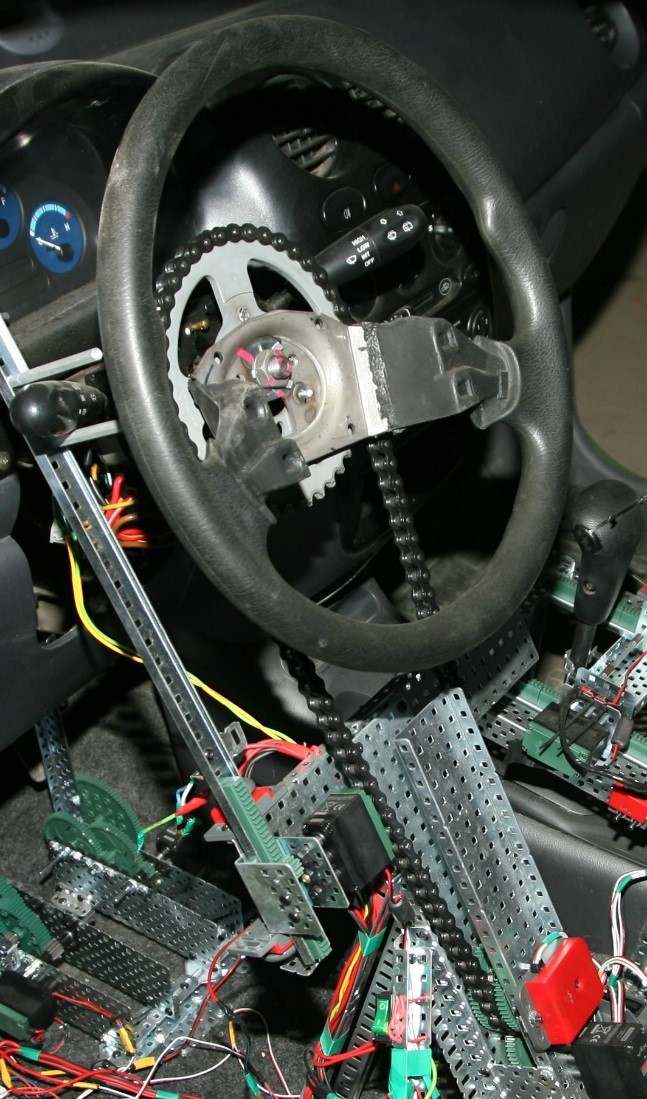
(рис.11) Звездочка на руле (рис.12) Механизм управления рулевым колесом.
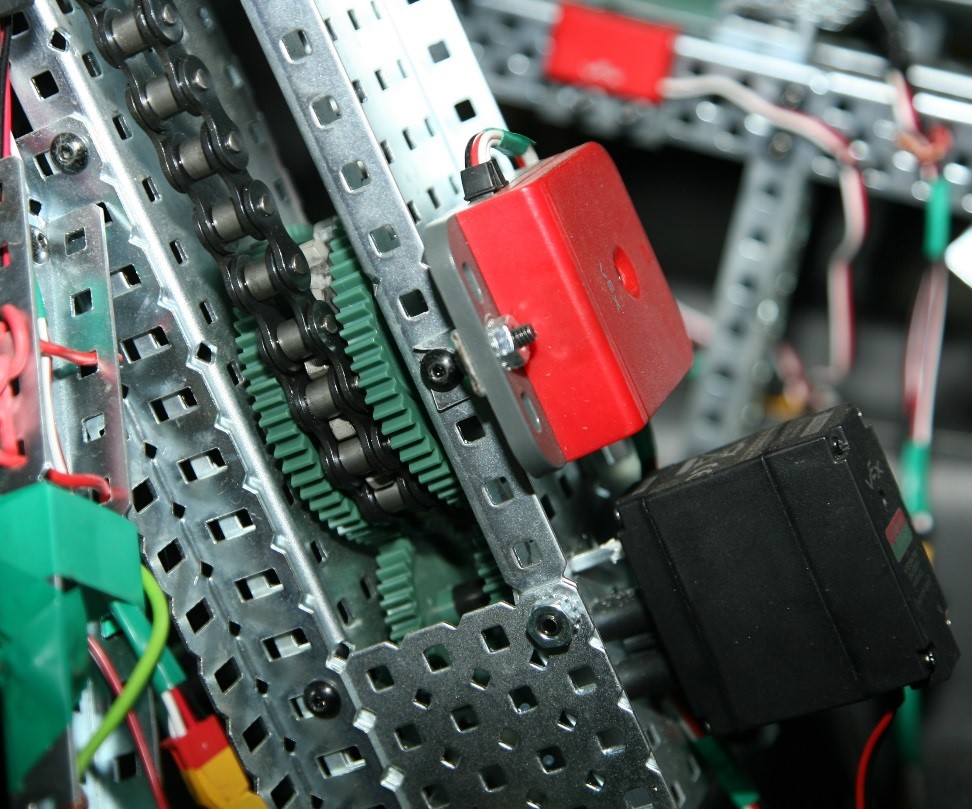
Механизм управления рулевым колесом, с энкодером и моторчиком.
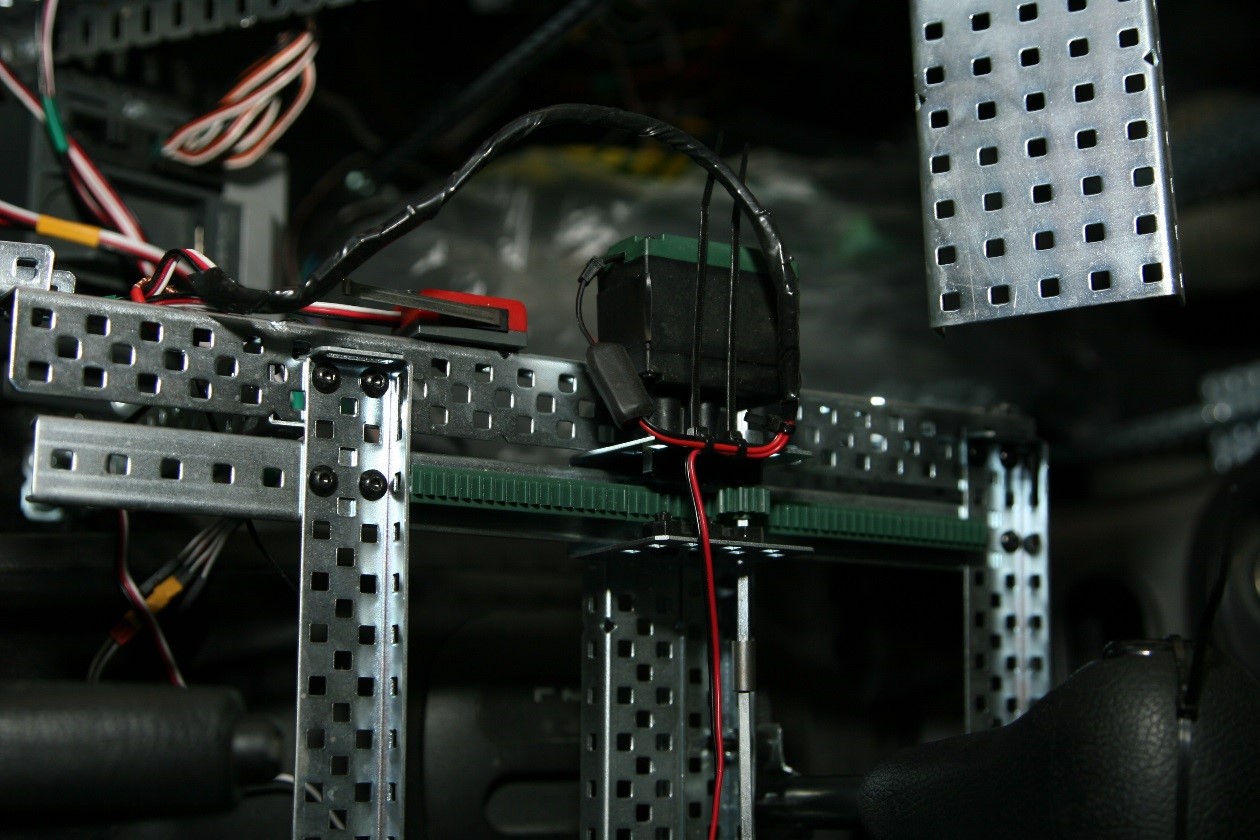
Для управления ручкой АКПП, мы использовали реечную шестерню из набора VEX (Рис. 12), и 2-х проводные моторы 393 (Рис. 3).

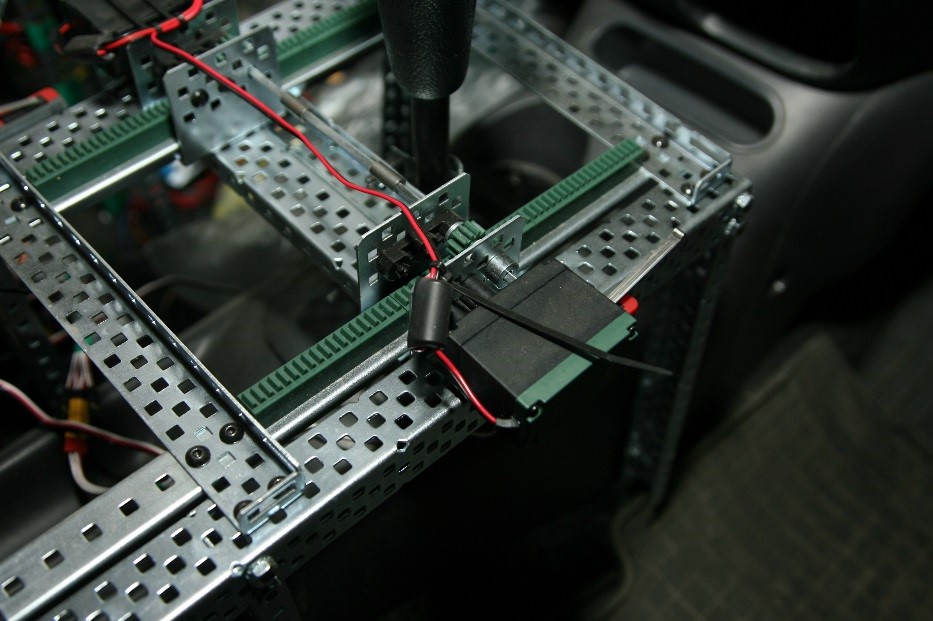
(рис.12) Реечная шестерня из набора VEX.

Далее собрали конструкцию и установили механизм управления ручки АКПП на автомобиль.
Вам понравилось? Расскажите о своем опыте своим друзьям в социальных сетях. Пусть им понравится тоже!